可拉伸无机柔性电子在不同界面条件下一致性工作的尺寸设计原理
在过去十几年间,可拉伸无机柔性电子技术的快速发展已经使大量的功能器件(比如,可拉伸电池,心脏活动传感器,可拉伸发光二极管,光遗传学平台和应变传感器)应用到复杂表面,比如人体皮肤和脏器表面以及柔性设备表面。基于力学指导的结构设计常被用于整合传统硬质无机半导体元件和几何结构化互联导线到软基底上,这保证了电子系统能够承受很大变形而不失效。到目前为止,基于波浪结构、岛桥结构(比如,弧形互联导线、蛇形互联导线、二维螺旋互联导线和三维螺旋互联导线)、分形结构、剪纸结构等各种各样的策略已经被采用到最先进的可拉伸无机柔性电子中。
精确性和稳健性对于可拉伸无机柔性电子的大规模商用从而提升人们的医疗条件和生活品质来说至关重要。在这一主题上,存在一个普遍存在的重要问题:这类器件通常在自由界面条件下进行设计和标定性能,然而在实际应用中器件与人体/物体的界面条件是相对复杂的,包括自由、可滑移以及固结等界面条件并且可在它们之间切换(图1)。实际变形模式和应变分布可能与自由界面条件下的初始设计目标和实验标定结果不同,这可能进一步导致电学性能的改变和非稳健性,甚至在长期疲劳后发生失效。这样的效应将会大大地限制器件的实际使用和进一步的商业化。在理想情况下,力学与电学性能(比如可拉伸性、耐久性、导电性和传感性能)应该对界面条件不敏感,这样才可以确保器件能够精确地、稳健地工作,不仅在理论或FEA模型以及实验室自由界面条件的标定测试中,而且也在人体皮肤/其他器官表面/柔性工业设备表面等复杂界面条件下。那么有没有任何通用的可拉伸无机柔性电子的设计原理去实现这个目标呢?
近来,中科院力学所苏业旺研究员团队研究了不同构形可拉伸无机柔性电子的界面条件对其力学与电学性能的影响。为了从理论上揭示规律,首先研究了波浪状结构,展示了其在不同界面条件下力学性能与封装厚度之间的关系(图2)。对于不同构形的可拉伸无机柔性电子,根据叠加原理和圣维南原理进行了一个通用的定性分析,给出了与波浪结构相似的结论(图3)。在上述研究基础上,提出了一个通用而简单的可拉伸无机柔性电子尺寸设计原理来保证力学与电学性能在不同界面条件下保持一致性,即器件/互联导线周期长度应该与封装厚度在同一量级或更小。通过蛇形结构可拉伸电子的FEA和实验,这个设计原理的适用性得到了验证(图4)。为了确保人体皮肤/器官的舒适性,根据上述设计原理,表皮可拉伸电子器件需要微米级的几何设计。这个发现对于保证可拉伸无机柔性电子在实际应用中的精确性和稳健性具有重要意义。
该研究成果以“A Universal Size Design Principle for Stretchable Inorganic Electronics to Work Consistently under Different Interface Conditions”为题近期发表于学术期刊《Advanced Functional Materials》(doi.org/10.1002/adfm.202210880)。论文第一作者为中科院力学所博士生李爽,通讯作者为中科院力学所苏业旺研究员。参与该工作的还有力学所博士生蓝昱群、华中科技大学黄永安教授和北京航空航天大学陈玉丽教授。此外力学所博士生张懋熠和赵阳也为该工作提供了技术支持。该工作得到了国家自然科学基金委、中国科学院从0到1原始创新计划、中国科学院交叉学科创新团队和中组部WRQB人才计划等项目的支持。

图1. 不同界面条件下的可拉伸无机柔性电子(a)可拉伸电子腕带作为示例;(b)电子器件在复杂界面条件(自由的、可滑移的或固结的)下的工作一致性需求
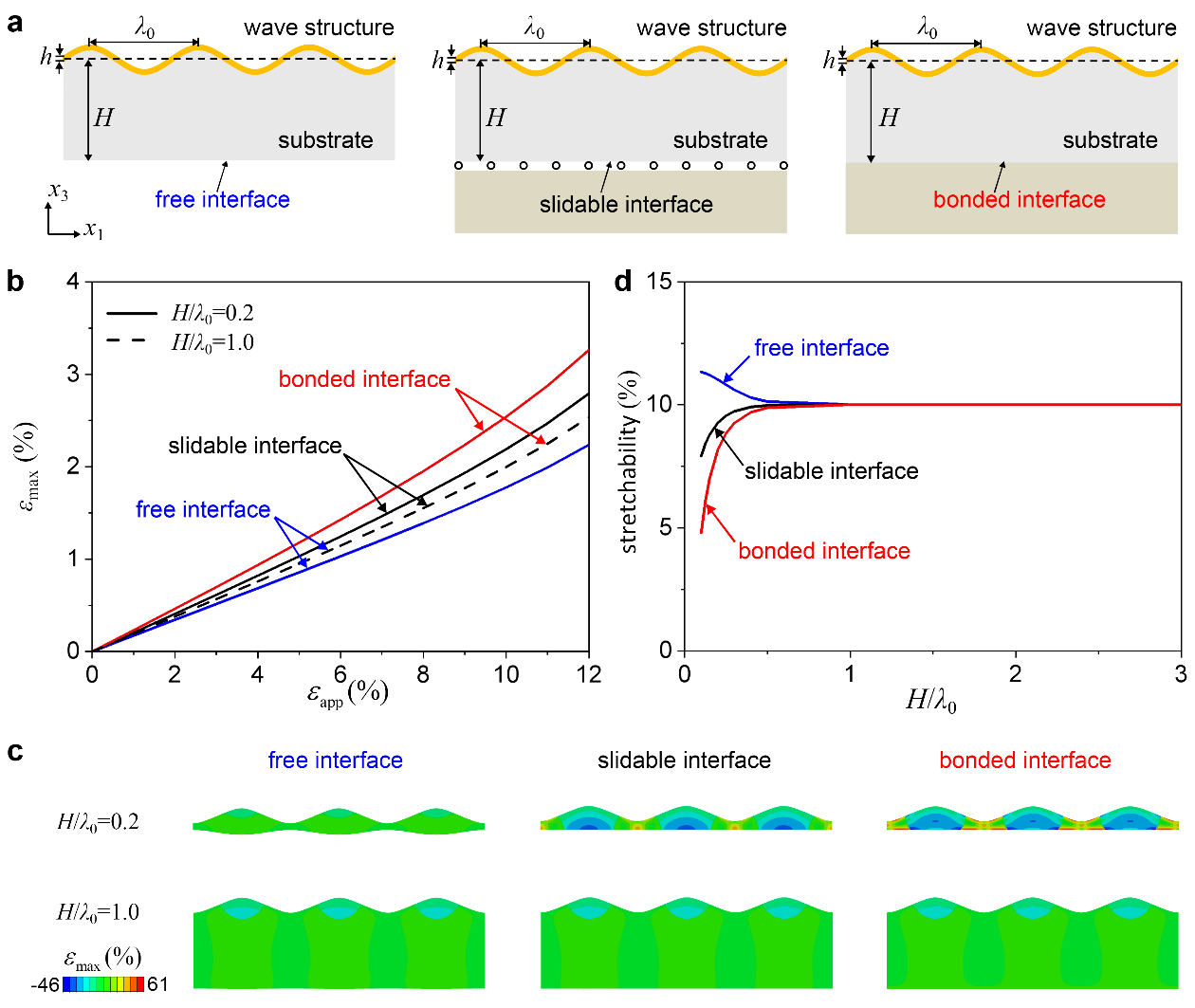
图2. 波浪结构可拉伸电子在不同界面条件下的分析(a)自由、可滑移和固结的三种界面条件;(b)三种界面条件下波浪状可拉伸电子的最大主应变随施加应变的变化曲线;(c)三种界面条件下薄/厚封装波浪状可拉伸电子的应变分布FEA结果;(d)三种界面条件下波浪状可拉伸电子的可拉伸性随封装厚度的变化曲线
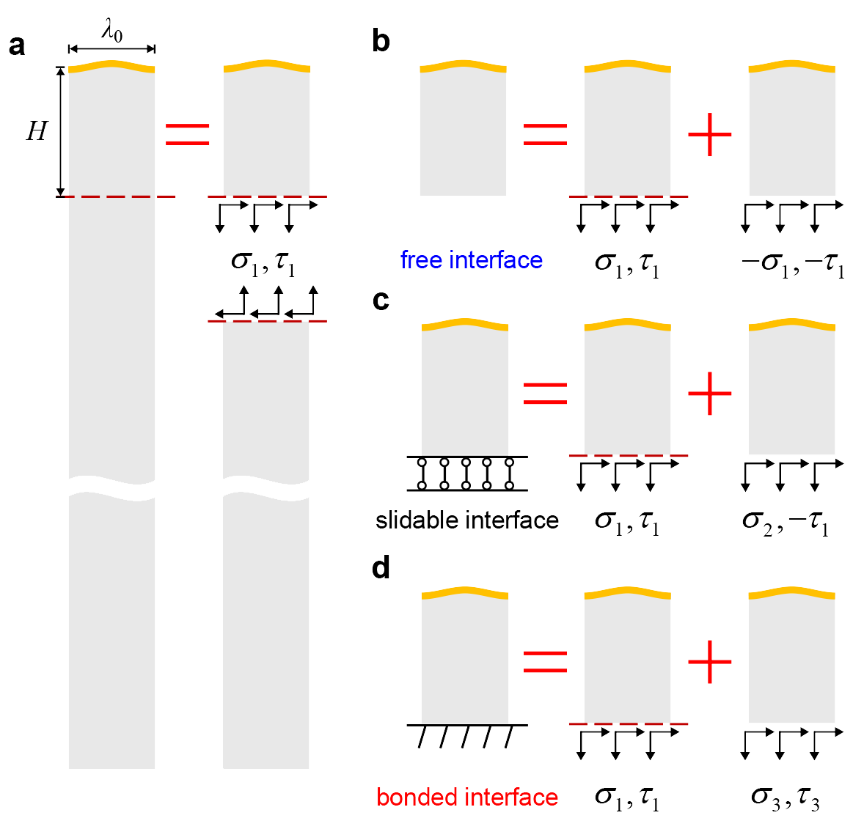
图3. 可拉伸无机柔性电子的一般性应力分析(a)无限厚度的可拉伸无机柔性电子;在(b)自由、(c)可滑移和(d)固结界面条件下的应力分解

图4. 界面不敏感设计原理应用于蛇形结构的验证(a)自由、可滑移和固结的三种界面条件;(b)三种界面条件下蛇形结构的可拉伸性随封装厚度的变化曲线;(c)三种界面条件下薄/厚封装蛇形结构的应变分布FEA结果;(d)三种界面条件下蛇形结构与封装材料间的最大界面应力随封装厚度的变化曲线;(e)三种界面条件下蛇形结构与封装材料间的界面应力分布FEA结果;(f)带有偏轴康铜箔的蛇形结构的设计图;(g)薄/厚封装蛇形结构的拉伸试样,用于自由界面条件和固结界面条件;(h)薄/厚封装蛇形结构在自由/固结界面条件下的相对电阻变化随施加应变的变化曲线
附件下载: