【释疑解惑】柔性应变传感器研究助力“天问一号”探测器成功着陆
《力学园地》编辑部:
看到一条信息,力学所的一个研究团队在火星探测器“天问1号”研制中,发挥了作用。很希望介绍一下其中的细节。
一名工厂技术员
2021/11/10
柔性应变传感器研究助力“天问一号”探测器成功着陆
李爽
2021年5月15日7时18分,执行我国首次火星探测任务的“天问一号”探测器顺利完成了“绕、落、巡”三大任务中“落”的任务,其着陆巡视器成功着陆于火星乌托邦平原南部预选着陆区。据国家航天局介绍,截至8月30日,“天问一号”的祝融火星车已在火星表面行驶了100天。这100天里,“祝融号”在着陆点以南方向累计行驶1064米。它搭载6台科学载荷,共获取约10GB原始科学数据,圆满完成了既定使命。目前,火星车的状态良好、能源充足,将继续向着陆点以南古海陆交界方向行驶,以获取更丰富的科学探测数据。“祝融”一小步,中国航天一大步!
我们感到欣慰的是,力学所研究团队研制的柔性应变传感器,为此次火星探测器的成功降落做出了积极贡献。
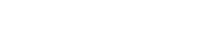
大家可能知道,我们是通过一次发射实现火星环绕、着陆和巡视探测的。探测器发射后,大约需要经过7个月左右的飞行才能抵达火星。它在进入环火椭圆轨道后,运行到选定的进入窗口,就开始实施降轨控制并释放出着陆巡视器。着陆巡视器进入火星大气后,通过气动外形、降落伞、发动机、多级减速和着陆反冲等措施实现软着陆。巡视器和着陆平台分离后,将开展区域巡视探测和相关的一些工程实践活动。下面的图1示出了这个着陆过程。
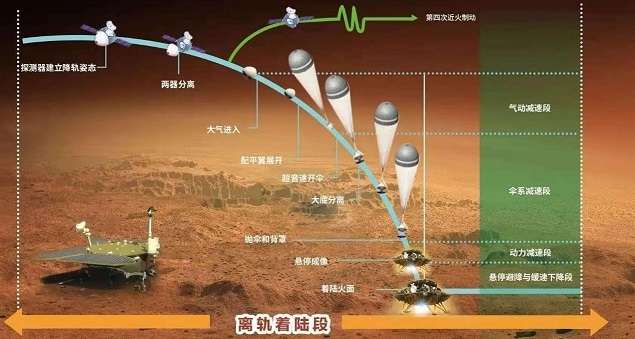
图1 “天问一号”探测器着陆过程
在着陆过程中,火星着陆巡视器的速度,需要在约9分钟内从约5 km/s的超高速降低到零。参见图1,可以知道减速过程包括四个阶段。在第一阶段中,着陆器利用自身气动外形减速,将速度从约5 km/s迅速降低到500 m/s以内;在第二阶段,着陆器的降落伞打开,使速度降到100 m/s以内;在第三阶段,着陆器的反推发动机开始工作,进一步将速度降到3.6 m/s以下;在第四阶段,当着陆器距离火星表面约100 m高时,开始悬停避障,选择合适区域完成降落。其中第二阶段所使用的降落伞主要由柔软的织物制成,若应变过大将发生破坏。这要求各条降落伞绳的应变均匀,且都不超过其破坏应变,以确保着陆器能够安全降落并开展巡视探测的科学任务。为了得到伞绳的应变不均匀程度和危险位置,从而优化降落伞设计,工程人员需要在发射前的地面验证实验中测量降落伞绳的应变。
然而,传统应变传感器的刚度较大,无法满足与伞绳保持动态共形贴合的要求。我们研究团队是中科院力学所非线性力学国家重点实验室专门从事柔性结构与器件力学研究的。我们研制出一种基于力学结构设计的线性度高、重复性好且温度敏感性低的柔性应变传感器。2019年,我们利用所研制成功的柔性应变传感器,协助中国空间技术研究院北京空间机电研究所完成了降落伞的部分地面验证实验(参见图2)。在图示的风洞内,在巨大温度变化、高速气流冲击和伞体剧烈晃动的情况下,我们对缩比降落伞的伞绳应变进行了实时监测,从而为降落伞优化设计提供了指导意见。我们相信,此类基于力学结构设计的柔性应变传感器未来将在我国航天领域的智能化技术革新方面发挥更多的作用。

图2 柔性应变传感器用于“天问一号”降落伞地面验证试验
这里,还要说明的是,柔性传感器可以在很宽广的领域中得到应用。除了应变的测量以外,还可以对曲率等参数进行测量,后者可以应用于人体运动或柔性可穿戴设备的监测。一般而言,应变式传感器是基于测量物体受力变形所产生的应变的一种传感器。电阻应变片是最常采用的传感元件。它是一种能将机械构件上应变的变化转换为电阻变化的传感元件(参见图3)。在测试时,将应变片用粘合剂牢固地粘贴在被测试件的表面上。随着试件受力变形,应变片的敏感栅也获得同样的变形,从而使其电阻随之发生变化,而此电阻变化是与试件应变成比例的,因此如果通过一定测量线路将这种电阻变化转换为电压或电流变化,然后再用显示记录仪表将其显示记录下来,就能知道被测试件应变量的大小。然而,常规应变片的刚度大,只适于测量小变形情况。柔性传感器要求测量大变形,因此它的刚度就必须足够小。我们研究团队所研制的柔性传感器采用普通材料,通过力学结构设计实现了大变形的应变测量并确保了线性度与重复性要求。

图3 电阻应变片的基本构造
下面给出一项柔性曲率传感器研究的实例。对于弯曲变形(曲率或弯曲角度)监测,之前主要有两类方法:1)采用应变传感器替代,这种方式要求传感器与人体完美粘合,一旦产生滑动,测量结果毫无意义,而这种粘合方式对于用户来说是难以接受的,所以不适用于实际的可穿戴设备;2)采用光学办法,设备复杂,不具有便携性,也不适用于可穿戴设备。
这种适用于可穿戴设备的薄膜贴片式柔性曲率传感器,可以精确测量被测曲面的动态弯曲曲率和弯曲角度,而且其弯曲测量结果不受拉伸变形的影响。在实际应用过程中,不要求传感器与被测曲面完美粘合,只需要贴合(允许小范围滑动,如戴手套或穿紧身衣的方式)即可。图4和图5分别给出传感器用于手势识别和坐姿监测的实测曲线。
图4 柔性曲率传感器用于手势识别

图5 柔性曲率传感器用于坐姿监测
附件下载: