先进结构及材料的非线性力学行为
随着先进制造技术的快速发展,各种类型的先进结构及材料不断涌现出来。其中,折纸变体结构和柔性智能材料由于其出色的变形能力和灵活的环境适应能力在软体驱动器、软体机器人、生物医疗器械等领域中具有重要的应用价值,吸引了大量的研究关注。在实际应用中,折纸变体结构和柔性智能材料常常会经历非线性大变形。因此,研究相应的非线性力学行为对于设计具有特定功能的先进结构和材料具有重要指导意义。
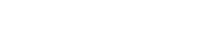
在折纸变体结构的非线性力学行为方面,段慧玲教授课题组通过交叉折叠纸带的方法构建了一种折纸弹簧结构,并使用连续化等效方法建立了该结构变体行为分析的几何模型,从而揭示了其拉扭耦合变体机理(如图6(a)所示);进一步提出了柔性折纸结构刚性化处理的思想,对折纸弹簧结构的非线性力学特性进行了分析和优化(如图6(b)所示);最后,基于拉扭耦合变体行为和非线性力学响应特性分析的结果,设计制备了多款具有弹射、爬行以及变体等功能的折纸弹簧机器人。相关研究成果发表于软体机器人领域顶级期刊《Soft Robotics》。此外,课题组还提出了一种双稳态的锥形折纸结构(如图6(c)所示),并建立了分析其非线性大变形行为的等效力学模型,继而揭示了其变体过程中的能量转化机制(如图6(d)所示)。通过对其能量泛函进行微分求导,得到了其稳态构型参数与单元几何参数之间的解析表达。最后,利用该折纸模型,发展了一套适用于各种类型的具有旋转对称性的折纸变体结构设计方法。设计出的结构不仅能够拟合给定的旋转对称曲面(如图6(e)所示),而且具有多个稳态构型,不同稳态构型之间还可以相互转换。相关研究成果发表于英国皇家学会会刊《Proc. Royal Soc. A》。
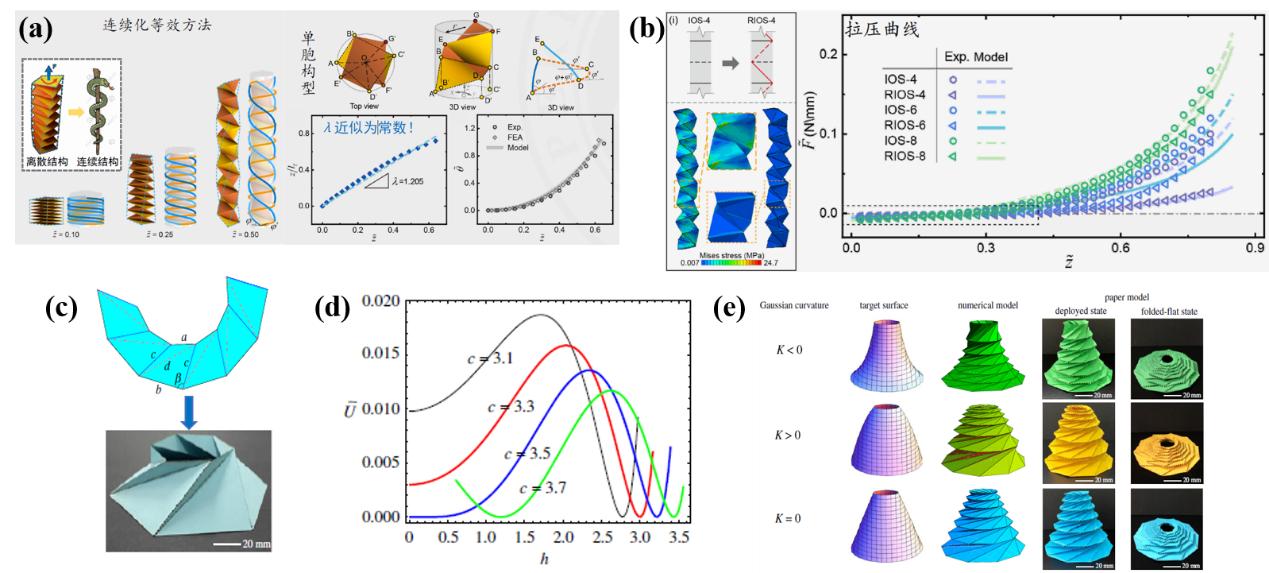
图6:(a) 折纸弹簧结构连续化等效方法(左)及变体行为分析(右);(b) 柔性折纸结构刚性化处理方法(左)及其非线性力学行为(右);(c) 锥形折纸结构的折痕图案(上)和折叠构型(下);(d) 锥形折纸结构的能量变化曲线;(e) 能够拟合指定旋转对称目标曲面的多稳态变体结构设计。
在柔性智能材料的非线性力学行为方面,段慧玲教授课题组首先聚焦于相变夹杂复合软材料,利用复合材料细观力学理论建立了相变夹杂复合材料的等效性能预测方法,准确预测了含固-液相变夹杂复合材料的变刚度行为(如图7(a)所示),以及含液-气相变夹杂复合材料的膨胀变形行为(如图7(b)所示);揭示了夹杂固-液相变过程中复合材料刚度变化的响应机制,以及夹杂液-气相变过程中复合材料刚度保持不变的机理。在此基础上,采用微流控3D打印的方法制备了含有液-气相变夹杂复合材料的双层曲梁结构,利用曲梁结构的非线性大变形特性,将其成功用于柔性抓手(如图7(c)所示)、以及可负载仿生尺蠖机器人(如图7(d)所示)等应用中。相关研究成果发表于英国皇家学会期刊《Proc. Royal Soc. A》以及软体机器人领域顶级期刊《Soft Robotics》。此外,围绕相变夹杂复合材料,课题组还研究了固-液相变复合材料在不同应变率加载下的抗冲击特性及其能量耗散机制;并设计了一种内部具有微通道的超材料,通过替换微通道内的液体,这种超材料可以吸收不同频段的微波。相关成果发表在《Acta Mech. Solida Sin.》和《Mater. Lett.》。
图7:(a) 含低熔点合金(固-液相变)夹杂环氧树脂复合材料的模量变化;(b) 乙醇(液-气相变)夹杂复合材料的热膨胀系数变化;(c)&(d) 基于含乙醇夹杂相变复合材料双层曲梁结构设计的抓手结构和可负载仿尺蠖爬行器结构。
附件下载: