【前沿动态】神奇磁导丝是怎样在血管里精准安全穿行的?
编者按:近期,中国科学院力学研究所超常环境非线性力学全国重点实验室的研究团队构建了两种典型血管(弯曲型和分叉型)环境下的磁性软体导丝力学模型,系统研究了避免导丝损伤血管的接触条件,并提出了磁性软体导丝安全导航的磁场调控策略。研究成果以Model-guided navigation of magnetic soft guidewire for safe endovascular surgery为题发表在Journal of the Mechanics and Physics of Solids上。该项研究获得国家自然科学基金等的支持。本刊特约请王柳撰写了科普文章,以飨读者。
神奇磁导丝是怎样在血管里精准安全穿行的?
王 柳
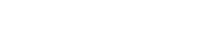
脑卒中(俗称中风)是一种严重脑血管疾病,具有高发病率、高致残率、高死亡率、高复发率和高经济负担的“五高”特点,是当前威胁我国国民健康的头号杀手。脑卒中可分为出血性脑卒中(脑溢血)和缺血性脑卒中(脑梗死)两种情况,如图1所示。前一种类型是脑血管破裂引起的,后一种是脑血管被堵塞而引起的。其中,缺血性脑卒中最为常见,约占所有脑卒中病例的70-80%。
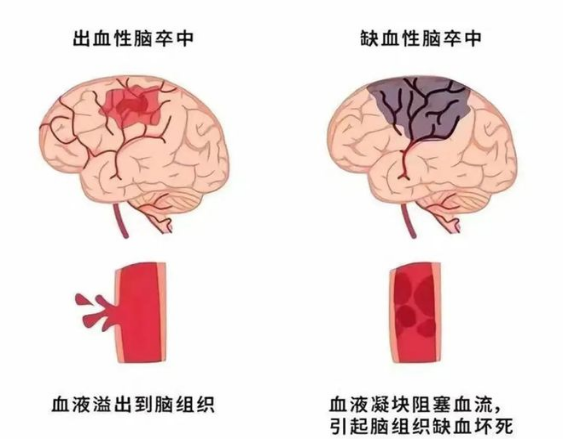
图1 脑卒中类型(图片来源:网络)
大脑需要持续的血液供应来获取氧气和营养,脑血管就是负责为大脑输送血液的管道。当某处的血管被血栓(通俗地说,就是一个凝结的血块)或者斑块(通俗地说,就是一些脂肪、胆固醇等沉积物)堵塞时,血液无法正常向大脑该区域供氧,受影响区域脑细胞则因缺氧和营养不足而受损,诱发缺血性脑卒中。我们都知道,大脑是人体的控制中心,当它的某一部分受损时,这个区域所掌管的功能会受到严重影响。例如,控制运动的脑区受损后可能导致一侧肢体瘫痪;语言中枢受损后会导致语言表达困难或语言理解障碍;控制感觉的区域受损后可能会引起肢体麻木或刺痛。因此,缺血性中风若不及时治疗,不仅会对患者某些身体功能造成永久性障碍,严重时还会危及生命。
缺血性脑卒中的抢救需要和时间赛跑。医学界普遍认为,如果能在发病后90分钟内进行治疗,患者的治愈率和生存率将显著提高。具体地说,应当及时疏通梗阻的血管、恢复脑部的血流灌注,这样便有助于减少脑组织的永久性损伤。现在最常用的手术方式是“介入手术”。所谓的介入手术是一种微创技术,医生通过穿刺血管或人体腔道,在医学影像的引导下,将器械精准送达病变部位来进行诊疗。这里说到的“医学影像”一般是X射线,由于导丝是金属从而会在影像中显示,医生借助于X射线影像可以实时观察导丝的位置和姿态,确保手术的安全和准确性。近年来,随着介入医学和影像医学的飞速发展,血管介入手术由于具有创伤小、恢复快的优势,已广泛应用于缺血性卒中的临床治疗。导丝是血管介入手术中的一个关键器械,它的核心功能是在复杂曲折的血管网络中建立治疗通道,并引导和辅助介入设备准确到达病变部位进行治疗。这里提到的介入设备是指用于扩张和支撑血管的支撑支架和球囊、用于抓取和移除血栓的取栓支架等。在治疗缺血性脑卒中的取栓手术中,导丝作为“前锋”率先突破血管狭窄或血栓堵塞的部位,精确引导取栓支架到达血栓位置并取出血栓,这样就可以快速地恢复血管通畅和脑部供血,如图2所示。
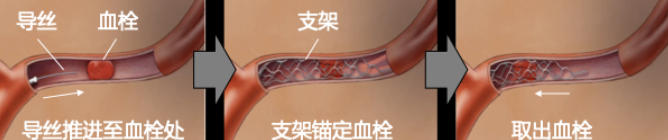
图2 血管介入取栓手术过程(图片来源:作者自制)
然而,基于传统导丝的血管介入手术也面临一些挑战。传统导丝需要医生在体外手动操作,通过推、拉、转等动作控制导丝在血管内的运动,因而高度依赖医生的经验和技巧,这样的手动操控在复杂血管网络中往往会出现控制精度低和导航难度大等问题。此外,在手术过程中,医生需要长时间依赖X射线影像进行实时观察和引导,为了抵御辐射必须穿着厚重的铅衣,这不仅增加了医生的身体负重,还增加了因辐射导致的患癌风险。还有,由于血管迂曲复杂而且分支众多,在血管弯曲或分叉处,导丝可能难以精确推进,甚至误入没有病变的非目标血管分支,增加了手术的风险。
为了克服传统金属导丝的局限性,一种新型的磁性软体导丝应运而生。磁性软体导丝由柔性软材料制成,内含可磁化微粒(图3)。通过调节外部磁场可实现磁性软体导丝端头偏转,从而精准控制导丝的运动方向和路径,这样可以进入传统导丝难以抵达的血管,特别是微小或迂曲的脑血管。磁性软体导丝无需手动操控,能在外部磁场作用下灵活调整路径,提高手术的精准性和安全性。同时,医生可以结合术前和术中的影像数据,主动规划磁性软体导丝的运动路径,确保最佳治疗效果。此外,随着手术机器人技术的不断进步,磁性软体导丝还可与机器人系统相结合实现远程操控,从而减少医生的辐射暴露,同时使偏远地区的患者也能在黄金治疗的时间窗口内接受及时的治疗。尽管磁性软体导丝在脑血管梗阻疏通等血管介入手术中展现了巨大潜力,但要真正实现临床应用还需克服一系列技术挑战,其中,如何让确保磁性软体导丝在真实血管环境中的安全导航、避免对血管造成损伤,是当下亟需解决的关键难题之一。
图3 磁性软体导丝(图片来源:作者自制)
近期,中国科学院力学研究所研究团队构建了两种典型血管(弯曲型和分叉型)环境下的磁性软体导丝力学模型,系统研究了避免导丝损伤血管的接触条件,并提出了磁性软体导丝安全导航的磁场调控策略。因为颈内动脉(ICA)的C1段和脑前动脉(ACA)的A1段分别代表了人脑动脉中两种主要的血管类型:弯曲型和分叉型,如图4a所示。图4b和4c展示了磁性软体导丝在这两类血管中的导航过程。由于血管壁所能承受的压强是有限的,分析导丝尖端与血管壁的接触作用是实现安全导航至关重要的一环。在我们的研究中,将导丝尖端与血管壁接触时的夹角定义为接触角(图4b),将二者接触面上的压强定义为接触压强。我们把接触压强用于评估导丝在血管内导航的安全性,具体而言,我们认为:当最大接触压强大于血管的安全接触压强时血管有损伤风险,反之则安全。

图4(a)颈内动脉(ICA)的C1段和脑前动脉(ACA)的A1段的示意图;(b)磁性软体导丝在弯曲型血管中的导航过程;(c)磁性软体导丝在分叉型血管中的导航过程
(图片来源:文献[1])
血管被简化描述为由血管直径w、弯曲半径r和弯曲角度α描述的闭合曲线(图5),导丝的变形则被限制在闭合曲线的内部。导丝总能量是磁势能和弹性势能之和,其中,磁势能是导丝在磁场中因其所处位置或磁性状态而具有的能量,弹性势能是导丝因自身弹性形变而积累的能量。这样,根据最小能量原理,可计算得到导丝在磁场作用和血管约束下的变形,进而得到导丝尖端与血管壁的接触角。这里的最小能量原理可表述为:一个系统会自发地趋向于使它的总能量达到最小的状态。
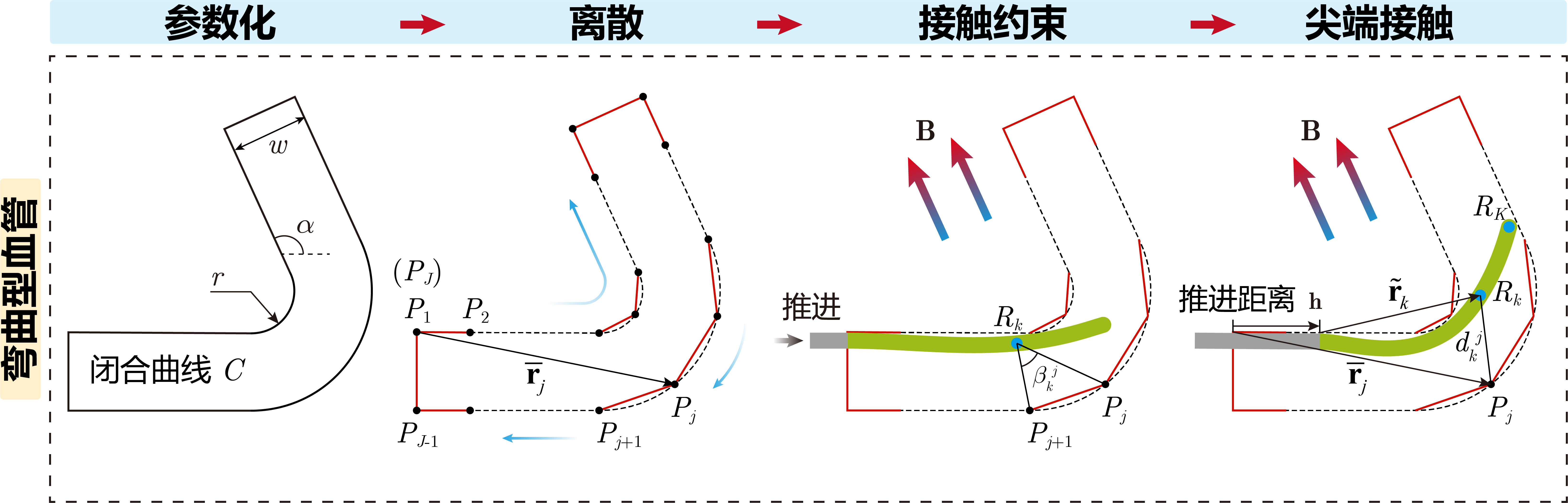
图5 弯曲型血管的力学建模(图片来源:作者自制)
由于直接求解导丝尖端与血管壁间的接触压强较为困难,我们研究团队通过分析接触角与接触压强之间的关系,提出了采用临界接触角替代临界接触压强作为血管内安全导航判断准则的理念,这样就使得判断过程变得更为简洁直观。图6展示了磁性软体导丝在血管内导航过程中与血管壁接触时接触角与接触压强之间的关系,它表明:最大接触压强随着接触角的增大而逐渐增大。当血管的安全接触压强为60千帕(kPa)时,对应的临界接触角为40°,因此可认为当接触角小于40°时,磁性软体导丝能够安全通过转弯而不对血管壁造成损伤。
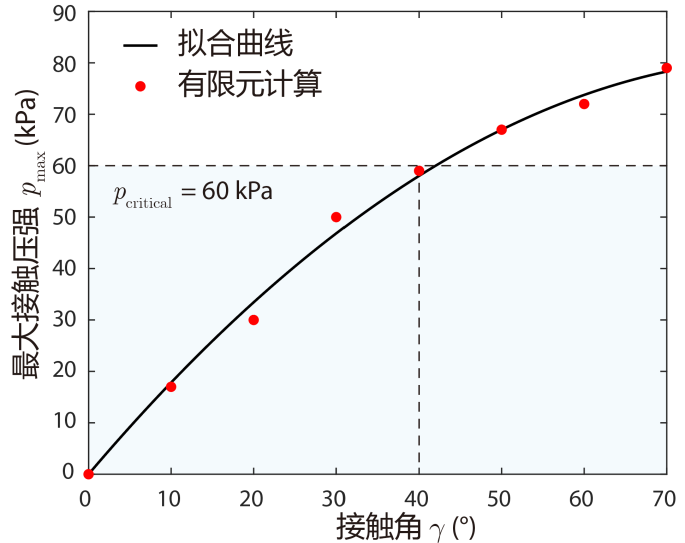
图6 磁性软体导丝与血管壁接触时接触角与最大接触压强之间的关系(图片来源:文献[1])
怎样调控就能实现安全导航呢?我们研究团队提出了下面两种磁场调控策略:(1)增大磁场强度(2)增大磁场角度。这里的磁场角度定义为磁力线方向与水平方向夹角。例如,对于颈内动脉的C1段,增大磁场强度和角度均能够减小接触角(图7a和b),并计算得出使得接触角小于临界接触角的磁场范围(图7c)。以强度45毫特斯拉(mT),角度125°的磁场为例,此时导丝与血管壁接触时的接触角减小为31°(图7d),使得导丝能够安全通过血管转弯处。在血管模型中的实验结果也验证了该磁场调控策略的有效性(图7e)。
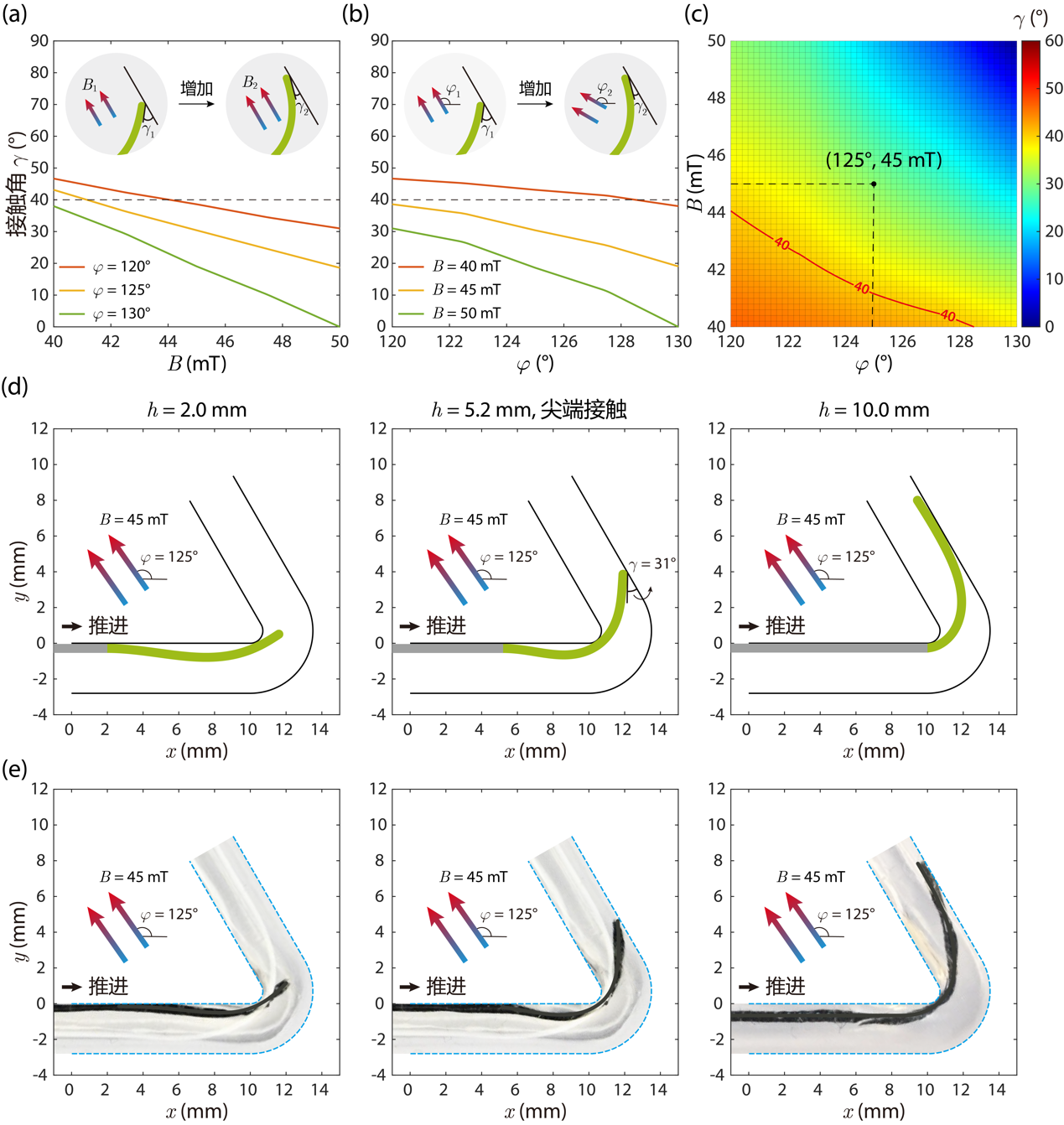
图7 通过调控磁场实现磁性软体导丝在颈内动脉(C1段)内的安全导航。(a)磁场强度与接触角的关系(b)磁场角度与接触角的关系(c)磁场强度、磁场角度与接触角之间的关系;导丝在强度45 mT,角度125°磁场驱动下的导航过程:(d)理论模型(e)实验结果(图片来源:文献[1])
同样的调控策略可以用在分叉型血管,例如对于脑前动脉(ACA)的A1段,采用强度55毫特斯拉(mT)、角度150°的磁场时,磁性软体导丝可以安全通过(图8)。
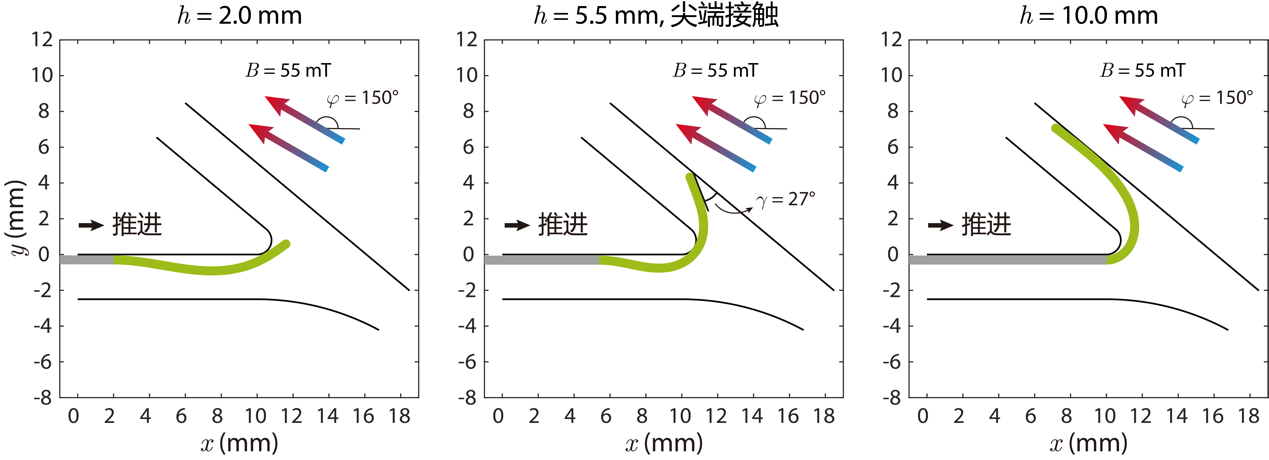
图8 导丝在强度55 mT,角度150°磁场驱动下的导航过程:理论模型(图片来源:文献[1])
我们研究团队提出的这个理论框架还能够应用于具有多转弯的弯曲型和分叉型血管。运用这个理论,人们可以快速构建涵盖不同尺寸和形状血管类型的接触角数据库,用于复杂血管环境下磁性软体导丝安全导航的术前评估,为磁性软体导丝在血管介入手术中的远程精准控制奠定基础。
参考文献:
[1] J. Li, H. Chen, L. Wang*, Model-guided Navigation of Magnetic Soft Guidewire for Safe Endovascular Surgery, Journal of the Mechanics of Physics and Solids, 2024, 190, 105731.
附件下载: