【前沿动态】助力我国首列时速600公里高速磁浮列车研制
编者按:力学研究所流固耦合重点实验室的杨国伟研究团队,自2016年开始承担由中车四方牵头的科技部重点研发计划“高速磁浮交通系统关键技术研究”任务,为解决我国时速600公里高速磁浮列研发面临的关键技术做出了重要贡献。因而被评选为力学所2021年度“十大亮点工作”之一。本刊特此发布吴晗为介绍此项工作撰写的文章,以飨读者。
助力我国首列时速600公里高速磁浮列车研制
吴晗
高速铁路以及高速动车组近十几年来获得了跨越式发展,已经成为了我国一张靓丽的名片,其运行速度可达每小时350公里,未来甚至可达每小时400公里。然而,人们对速度和效率的追求是永无止境的,像目前高速动车组这种类型的轮轨列车受轮轨黏着限制,继续发展受到一定的限制。因为随着速度提高,在轮轨牵引黏着系数下降、空气阻力增加的共同作用下,实现更高速度运行是十分困难的。这里的黏着系数是最大动轴牵引力与轴载荷的比值,一般而言,黏着系数与车速成反比。此外,轮轨列车在高速下运行时会伴随着强烈的碰撞和摩擦,从而导致服役可靠性的降低以及维护成本的增高。相比之下,高速磁浮列车通过电磁力实现列车与轨道之间的无接触的悬浮和导向,再利用直线电机产生的电磁力牵引列车运行,因此比轮轨列车具有速度高、启停快、噪音低、振动小、载客量大、维护量少等优点,而且安全可靠,是下一代高速轨道交通车辆的重点发展方向。
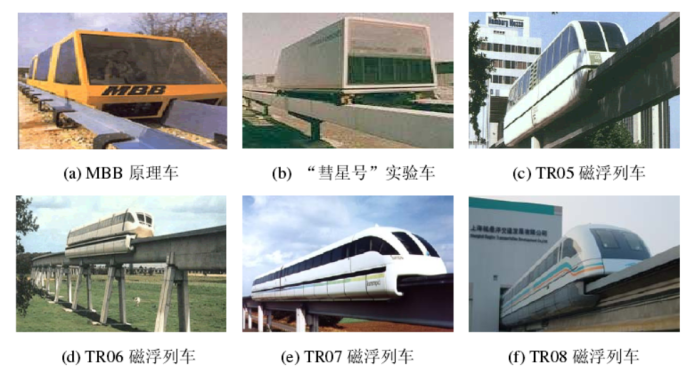
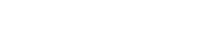
图1 常导磁浮列车发展历程(图片来源:网络)
图1示出常导磁吸式磁悬浮列车的发展历程。所谓的常导磁吸式是指依靠电磁铁吸引轨道而悬浮的磁悬浮列车类型,区别于超导排斥型磁浮列车。在中国,常导磁吸式磁悬浮列车从20世纪70年代开始发展,其设计速度在逐渐提高。2021年7月20日,时速600公里高速磁浮交通系统在中车青岛四方机车车辆股份有限公司下线(图2)。它由中国中车股份有限公司承担研制、力学所深度参与研制,具有完全自主知识产权。这是世界首套设计时速达600公里的高速磁浮交通系统,标志着中国掌握了高速磁浮成套技术和工程化能力。

图2 时速600公里高速磁浮列车系统下线(图片来源:网络)
按实际旅行时间考虑,在1500公里运程范围内,高速磁浮是最快的交通方式。由于不受轮轨黏着限制,它具备更强的加减速能力。轮轨高铁从静止加速到时速350公里需要6分钟,而高速磁浮从零加速到时速600公里只需3分半钟。快起快停,使高速磁浮列车能更加充分地发挥速度优势。由于无接触运行,不会产生与轨道的摩擦和碰撞,高速磁浮列车运行时产生的噪音大幅降低,与周围的环境更加友好。没有摩擦和碰撞,列车发生磨耗和疲劳损伤的概率也会低很多,使得列车在全寿命周期上的维护成本具有很大的优势。
首套时速600公里高速磁浮交通系统采用的是成熟可靠的常导技术。它的基本原理是:利用电磁力来实现列车“无接触”运行。参见图3,车辆底部的悬浮架装有电磁铁,与铺设在轨道下方的铁芯相互吸引,产生向上的吸力,从而克服地心引力,使车辆“悬浮”起来,再利用直线电机驱动列车前行。高速磁浮运行时,通过精确控制电磁铁中的电流,车体与轨道之间始终保持约10毫米的悬浮间隙。高速磁浮这种无接触的运行方式,取代了传统轮轨的机械接触支承,从根本上突破了传统轮轨关系的约束,因而可以达到更高的运行速度,实现了时速600公里的极速“贴地飞行”!
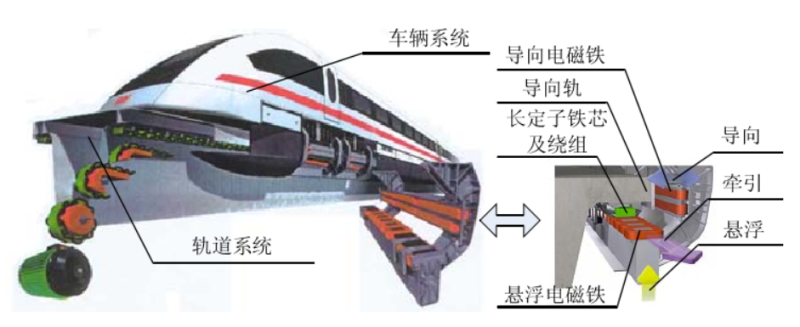
图3 常导磁浮列车结构示意图(图片来源:网络)
这套高速磁浮采用“车抱轨”的运行模式:车辆底部的悬浮架有两个臂从外侧包住轨道,列车环抱着轨道行驶。这种结构保证了车辆不会脱轨,安全可靠性高。与传统交通方式不同,它的牵引供电系统布置在地面,随列车位置分段供电,相邻分区只有一辆列车运行,基本没有追尾风险。
目前,高速磁悬浮列车系统已经整车下线,并进行了低速滑跑调试。由于限于线路条件,以及其他一些关键问题仍待解决,并未真正实现达速实验。这其中,列车研制中所面临的科学问题是重要的制约因素。力学所杨国伟研究团队深度参与我国时速600公里磁浮系统的研发,自2016年开始承担由中车四方牵头的科技部重点研发计划“高速磁浮交通系统关键技术研究”任务,为解决高速磁浮列车高速运行时面临的关键技术做出了重要贡献,有力支撑了新一代磁浮列车的研发。
研究表明,列车以时速600公里运行时,尾部车厢会受到近10吨的气动升力,将导致列车的悬浮稳定性降低,而在两车明线交会时尾箱气动升力甚至接近14吨,造成悬浮控制失效,如图4所示。
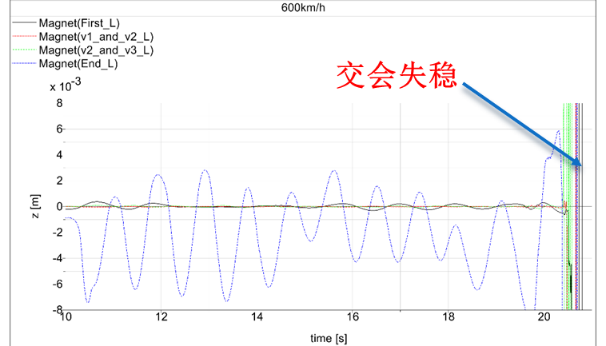
图4 磁浮列车明线交会载荷及动态响应
特别需要说明的是,常导磁浮列车依靠电磁力克服重力实现悬浮,但电磁悬浮是先天不稳定的。为何称之为“先天”不稳定呢?因为在静平衡状态时,如果不加控制,悬浮系统受到任何一点干扰即会发生失稳,失稳之后则会电磁铁和轨道吸死或电磁铁掉下来。因此,必须对电磁力进行实时的主动控制,悬浮控制技术是影响列车安全和动力学性能的关键技术,而高速运行时所带来的极强的气动载荷甚至冲击又对悬浮控制带来的更大的挑战。为了解决制约磁悬浮列车时速600公里安全运行的气动载荷以及悬浮控制问题,中科院力学所研究团队针对列车的空气动力学、车辆动力学以及悬浮控制方面开展了大量的研究。
磁浮列车的气动效应问题主要涉及下述几个方面。首先,磁浮列车运行环境复杂,尤其在雨雪沙以及强侧风等恶劣气候环境下,使得列车表面湍流边界层的发展极不稳定,导致列车气动力特性发生明显变化,极端情况下将会影响列车运行安全性。其次,磁浮列车最高运行速度可以达到每小时600公里,列车周围流场结构发生了显著变化,主要表现在尾流区域脱落的涡结构更细、非定常脉动更剧烈,与复杂地面的耦合更紧密。第三,列车运行工况包括明线会车、通过高架桥梁、穿过隧道以及隧道内高速交会等多种复杂情况,在高速下马赫数大为增加,气体的压缩效应非常明显,列车表面压力急剧变化,列车承受着强烈的交变气动冲击,影响列车运行的稳定性、安全性以及乘客的乘坐舒适性。此外,超高速度下磁浮列车的气动噪声不可忽视。气动噪声水平与列车运行速度的6-8次方成正比,随着列车运行速度的不断提高,气动噪声越来越显著。过大的噪声将严重影响旅客和铁路沿线人们的生理和心理健康,还可能引起周围有关设备和建筑物的疲劳损坏,缩短使用寿命,列车噪声污染已成为制约高速铁路发展的一个瓶颈。
力学所杨国伟研究团队基于高精度数值仿真平台和高效率气动外形优化平台,针对五编组高速磁浮列车的十三种头型方案进行明线运行、侧风稳定性和远场气动噪声的数值仿真分析与评估。重点研究了时速600公里运行速度级以及每秒37.3米横风速度的场景,得到了不同速度下五编组列车不同车厢的六分量气动力系数,比较了不同头型在横风条件下列车承受侧向力系数,研究了不同速度下远场不同部位的气动噪声声压级,为高速磁浮新头型的最终确定提供理论依据。通过研究,他们确立了时速600公里高速磁浮的最优外形,在气动阻力、升力以及噪声性能方面相对于国内上海磁浮列车均具有大幅提升,气动阻力相对于原型车降低约18.9%,气动升力最大可以降低约22.7%,气动噪声降低约3.9%(参见图5,6所示)。在图5中,速度云图是列车头部附近大气绕流场的速度(Velocity)分布(单位是米/秒),压力云图是列车车身处大气的相对压力(Pressure)分布(单位是帕)。所谓的“相对压力”是大气作用在车身上的绝对压力与大气压的差值。
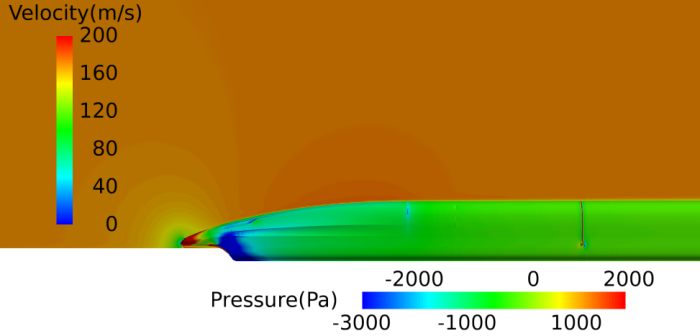
图5 典型头型的速度和压力分布云图
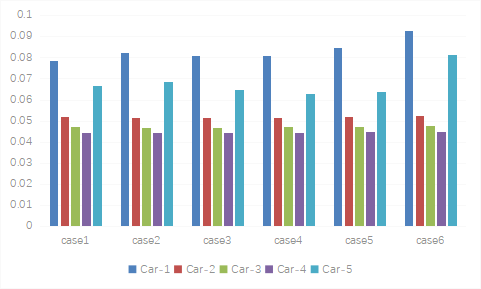
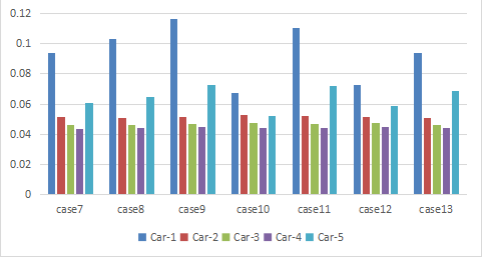
图6 13类外型工况下各车厢阻力系数比较
此外,为了满足高速磁悬浮列车的气动性能、动力学及控制性能等流固耦合问题研究的数值模拟方法的验证,中科院力学所研究团队还对原高速列车动模型实验平台进行了升级改造,并新建设了高速磁浮气动-车-轨-控制试验平台。这里简介如下。
动模型试验平台采用双线布置结构,分为上下两层,下层为拖车运行轨道,上层为模型车运行轨道。全长264m,沿长度方向,整个试验平台分为加速段,匀速试验段和制动段三部分。加速段由空气炮驱动活塞并带动模型加速至预定速度。匀速试验段是主要的测试段,相关的空气动力学实验都在此部分进行。总长约为100m。制动段的刹车系统采用永磁涡流制动和传统摩擦制动相结合的方式,当列车模型高速进入刹车段时,列车底部的永磁铁装置经过刹车段的刹车条,磁铁产生的磁通使得刹车条内产生电动势和涡流,通过涡流磁场和永磁体磁场的相互作用,产生切向制动力矩,当速度较低时,主要为列车模型支撑滑块与轨道间刹车条的摩擦力产生制动力,二者结合能保证长期连续使用,在高速范围内,减小制动距离,自身不会产生过多热量,保持系统的稳定性和持久性。经过以上设计,测试最高速度提升至每小时600公里,可以实现高速磁浮列车的明线、明线交会、隧道以及隧道交会等条件下的气动载荷测试。特别地,为满足侧向风作用下的测试条件,在动模型平台上设计加装了横风装置。动模型横风装置采用风机阵形式,布置在一个风洞内(参见图7)。该风洞设计为半直流式风洞,洞体由收集器、风机段、扩散段、拐角、稳定段、收缩段、喷口等部分组成。风洞总长15m宽20m高6m。能在实验平台的匀速试验段提供平直、均匀、稳定的射流流场,在标准大气状态下空风洞最大风速50m/s,流速稳定性5%,流速均匀性10%,湍流度5%,气流偏角:α≤2°β≤2°。

图7 高速动模型试验平台及横风装置
2、高速磁气动-车-轨-控制试验平台
高速磁浮气动-车-轨-控制试验平台是基于一个电磁铁悬浮模块开展的结构设计。试验平台主要由电磁铁模块、长定子轨道、悬浮传感器、控制单元、液压作动系统、支撑系统、直流电源以及DSPACE实时仿真系统等组成。试验平台主体结构设计可以通过液压作动加载实现悬浮系统的气动升力和轨道不平顺的耦合加载和测试。基于DSAPCE实时仿真系统设计了平台的悬浮控制系统(见下图8),DSAPCE实时仿真系统是一套基于MATLAB/Simulink的控制系统开发及半实物仿真的软硬件工作平台,实现了和MATLAB/Simulink/RTW的完全无缝连接。基于该系统的悬浮控制系统设计可以实现控制算法的流程化设计、代码自动编译下载等。试验台悬浮总质量2.7吨,实现真实磁浮车辆的车体、磁浮架、电磁铁之间的二级悬挂结构,可以反应磁浮列车的车轨相互作用情况,配置的轨道液压激振系统可对轨道激振,额定振动幅值5mm,频率7.5Hz,车体液压激励系统可以模拟气动升力,最大静态实验力25kN,动态试验力20kN。该平台可以模拟列车以时速600公里运行时的气动-车-轨-控制相互作用情况。
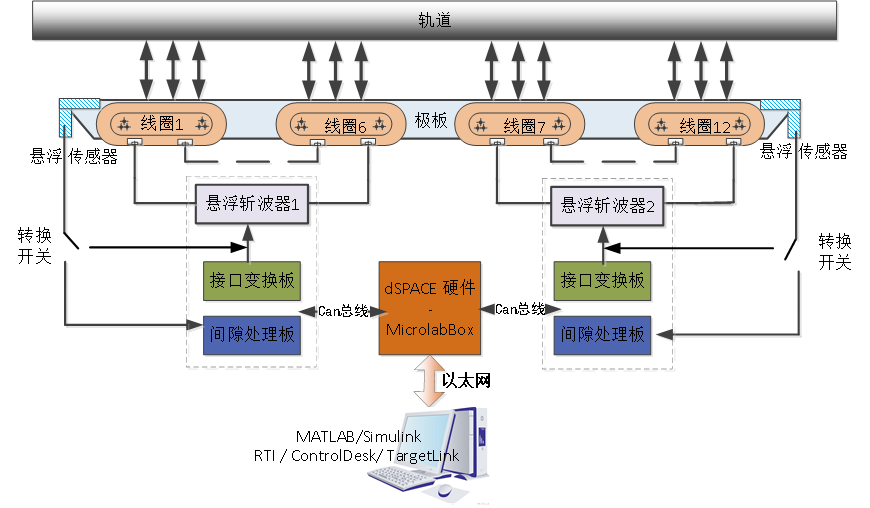
图8 磁浮试验平台控制系统示意
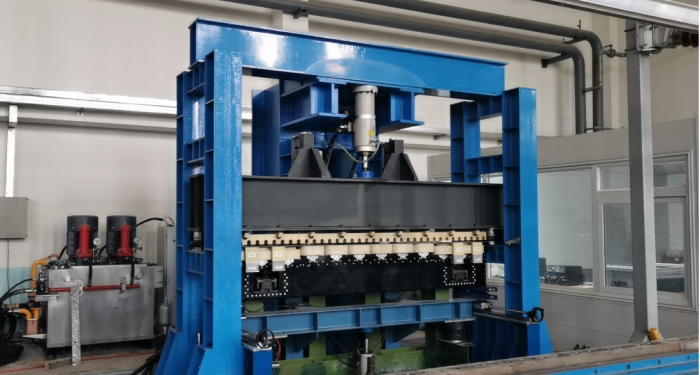
图9 磁浮试验平台
随着磁悬浮技术的成熟和发展,超导磁浮、真空管道超级列车等系统也将相继面世。展望未来,高速磁悬浮列车系统将成为我国交通领域发展的新引擎,会充分发挥示范引领作用,为交通强国建设提供经验借鉴。力学所高铁团队基于在高速列车研究领域的长期研究积累和完善装备基础,必将在我国高速磁浮列车的发展中继续发挥科学引导的作用。
附件下载: