【前沿动态】Janus微纳马达和气泡微机器人
编者按:近年来分子机械作为一种多学科交叉的新兴技术,得到越来越多学者的关注。得助于纳米技术的突飞猛进,多种微纳马达(Micro/Nanomotor)被研制出来,它们能够在微纳米这样小的尺度上将化学能等能量转化为机械能,实现驱动、控制等多方面的功能。Janus双面微纳马达和气泡微机器人便是其中的例子。本文介绍了力学所非线性力学国家重点实验室的微纳流动课题组在这个领域取得的若干进展。
郑旭
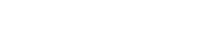
2016年诺贝尔化学奖授予了三位学者:法国的让-皮埃尔 索瓦日(Sauvage),美国的弗雷泽 斯托达特(Stoddart)以及荷兰的伯纳德 L 费林加(Feringa),以奖励他们在分子机械(molecular machines)领域做出的杰出贡献。在自然界中,有一个典型的天然分子机械是生物体内的分子马达(molecular motor)ATP合成酶。ATP是各种活细胞内普遍存在的一种高能磷酸化合物“三磷酸腺苷”的英文缩写,ATP合成酶通过催化反应将ADP(二磷酸腺苷)合成为ATP并释放化学能,以维持细胞新陈代谢等各种生命活动。生命体的一切活动,包括肌肉收缩、物质运输、DNA复制、细胞分裂等,追踪到分子水平,都是来源于具有马达功能的蛋白质大分子做功、推送的结果,因此它们被称为分子马达或蛋白质马达。
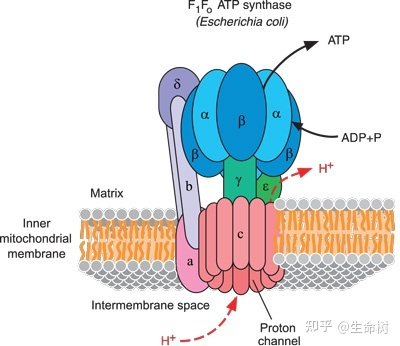
图1 ATP分子马达(图片来源:知乎网)
受到这些精妙的生物分子马达的启发,同时得益于纳米技术的突飞猛进,多种微纳马达(Micro/Nanomotor)被研制出来,它们能够在微纳米这样小的尺度上将化学能等能量转化为机械能,实现驱动、控制等多方面的功能[1]。
作为微纳尺度的动力装置,微纳马达具有体积小、质量轻和驱动力大等优点,在传感检测、微纳加工和环境治理等方面表现出突出的优势,特别是在生物医疗领域展现了巨大应用前景[2-3]。大家可能还会记得,半个多世纪前科幻电影《Fantastic Voyage(神奇的旅程)》中,就曾出现能在人类血管中来回穿梭的纳米机器,它不仅可以抓取血红细胞,还可以递送药物、修复血管等。虽然科幻电影中的场景尚未完全实现,但这个新颖的设想一直激励着研究人员不断进取攻关。近年来,可以在胃部的胃酸环境中提供推进能量(propulsion in gastric fluid)进行体内药物递送(vivo drug-delivery)、杀灭细菌的微马达[4](参见图2A),乃至已被临床应用的微窥镜磁控机器人[5]先后被研发成功(参见图2B),充分展示了微纳马达技术在生物医学领域的广阔应用前景。在图2B中,我们示出了香港中文大学开发的一个内窥镜(Endoscopic view)与超声跟踪(ultrasound tracking)的组合系统,它采用磁场单元(Magnetic field unit)来控制软体机器人(Soft robots),向胆管(Bile duct)传送药物,其递送速度可达每分钟2毫米。在这些应用中,生物体液等复杂流体环境中微纳马达的运动机理和力学规律是一个关键的基础问题,也被认为是纳米尺度下的“火箭科学”(rocket science at the nanoscale)[6]。

图2 (A) 微马达胃部药物递送[4];(B)微窥镜磁控机器人[5]
微纳马达种类众多,这篇文章主要介绍Janus双面微纳马达。本世纪初,美国哈佛大学的Whitesides课题组[7]以及美国帕克大学的Sen和Mallouk课题组[8]做出了这个领域的开创性工作,他们制备了以过氧化物为燃料的柱状微纳马达。在此基础上,金属-绝缘体(如Pt-SiO2)双面结构的球形微纳马达开始发展起来,它们的共同特点是通过铂(Pt)等金属的催化性来消耗溶液中的“燃料”物质,将化学能转变为马达前进的机械能,仅通过建立局部的梯度场来实现自驱动。这类燃料常采用过氧化氢H2O2,它可以发生催化分解反应2H2O2?2H2O+O2(参见图3A)。由于这类微纳马达往往由表面物理化学属性相异的两部分组成,因此人们借用古希腊的两面神“Janus”来命名。事实上,1991年诺贝尔物理奖得主德 热纳(de Gennes)在他的获奖演讲中就曾提及利用Janus微球的两面异性来建立局部浓度场、电场或温度场的想法。相应地,利用局部有空间变化的(或称之为“梯度”)浓度场、电场、温度场来实现微纳马达的自驱动运动(参见图3B),分别被称为自扩散泳(self-diffusiophoresis)、自电泳(self-electrophoresis)或自热泳(self-thermophoresis)。所谓泳动(phoretic motion),是指颗粒在外场梯度下的定向迁移,它们的名称前加上“自”是因为此时物理场是自发生成的而不是外加的。此外,在一定条件下反应生成的氧气会形成微气泡,形成通过气泡推进的微马达[9]。
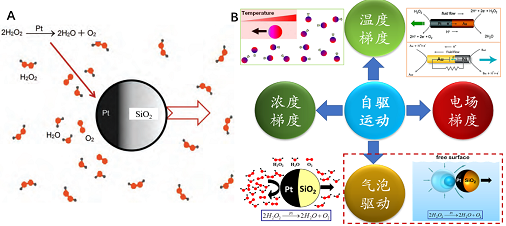
图3 (A)典型的Pt-SiO2结构Janus球形微纳马达及在Pt表面发生的化学反应;(B)微纳马达的自扩散泳、自电泳、自热泳以及气泡驱动。(图片来源:作者自绘)
上述不同的局部梯度物理场引起的微纳马达自泳动,源自于马达的液固界面附近的流动。以自扩散泳为例,其简化的模型如图4所示。化学反应是在铂的表面进行的,反应产物是水和氧,因此铂附近的过氧化氢溶液里有大量的氧分子(图4中的黄色小颗粒)。对于铂附近的过氧化氢溶液则为氧分子)在铂(Pt)一侧的表面浓度较高,这样就在沿Pt表面的切线方向形成了浓度梯度。此浓度梯度使得沿界面切线产生压力梯度,从而在界面贴壁层内形成沿浓度梯度方向流向高浓度区的流动。界面贴壁层内的流动决定了微纳马达泳动效率,所以研究微纳马达驱动的力学机制是流体力学家的一项任务。
图4 自扩散泳的贴壁层及流场示意图[10]
我们在前面曾提到了当Janus微纳马达的“燃料”过氧化氢浓度较高时可能产生氧气微气泡,出现了另外一种微马达的驱动方式——气泡驱动。当然,溶液中的微气泡的形成、生长需要满足一定的条件,而且当气泡尺寸长大到内外压强平衡被打破则无法再维持气泡的液气界面时,会发生气泡溃灭。有关研究表明,通过引入微气泡溃灭的惯性效应产生瞬态射流,应该是比单纯依靠化学反应产生梯度物理场要具有更高的推进效率。
总之,能够自主运动的微纳米机器在过去的十余年间得到了飞速的发展,而作为关键的动力部件——微纳马达的研究也逐渐深入。如上所述,所谓的微纳马达就是能够将周围环境中的能量转化为自身运动的活性(active)微纳颗粒。所谓活性是指颗粒可以自主产生驱动力,也是目前研究的热点领域。如果微纳马达形状能做出改变以方便携带物质进行输运,在应用中将更具有吸引力。但是,制备非常规球形的微纳马达对于微纳流控技术是一个挑战,研究非规则形状对于化学反应、微气泡生成、溃灭射流等因素的影响也是一个新课题。力学所非线性力学国家重点实验室的微纳流动课题组,通过自主研发的微流控芯片流动聚焦技术,制备了具有不同凹/凸曲面的碗状微马达[11]。图5示出碗状微马达的制备工艺:利用磁控溅射(Magnetron sputtering)方法在碗状马达的表面镀上金属铂(Pt);通过Pt镀层的位置来控制微气泡分别生成于凹面或者凸面,可以相应地实现微马达朝凸面或凹面驱动。图6是他们给出的凹/凸马达的实验流场图像[12],其中包括微气泡溃灭产生的射流(jet flow)和旋涡(vortex)。他们的研究还揭示了曲面曲率对微气泡成核及生长过程的影响,发现凹面抑制气泡形成并导致较小的微气泡尺寸及较慢的气泡生长周期。因而从凸面生长气泡并朝凹面运动的微马达具有更高的速度。这些研究结果为通过形状调控微马达驱动机制及微气泡动力学行为提供了理论依据,并为微机器人应用中采用非常规形状微马达提供了新的思路。
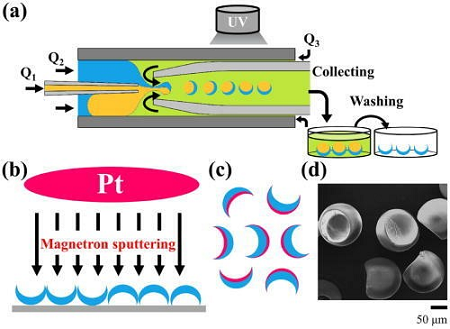
图5 利用微流控芯片流动聚焦技术制备的碗状微马达 [11]
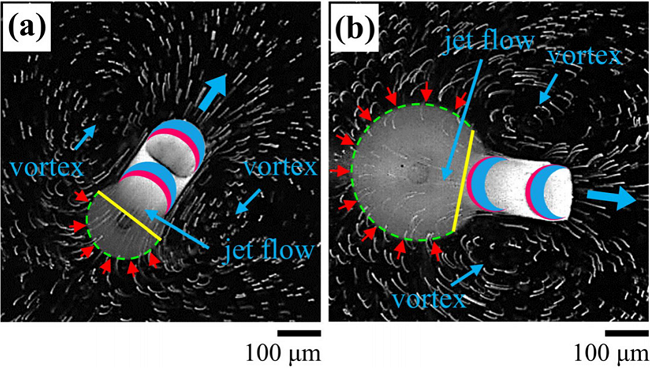
图6 凹马达(左)和凸马达(右)的气泡溃灭射流流场的实验结果[12]
更进一步的研究表明,当Janus微马达的尺寸达到几十微米时,反应产生的氧分子可以凝聚成核形成气泡,Janus微马达的运动机制将从梯度场主导的泳动驱动(Phoretic Motion),转变为依靠微气泡提供动力的气泡驱动(Bubble Propulsion)。得益于气泡溃灭时的高能量,气泡驱动型微马达运动最大速度可达0.1m/s,具有较强的运动能力,使其在高效水污染处理及医疗健康(例如,更换角膜及眼睛房水内药物输运)等领域展现了较强应用前景。人们称之为气泡微机器人(Bubble Microrobot)。微纳流动课题组发展了新型磁控多工作模式的气泡微机器人,他们搭建了三维Helmholtz线圈磁控系统,可通过手柄或程序对内嵌磁性镍层的Janus微球的朝向或运动进行便捷且高效的操控(图7)。此外,他们还通过调整Janus微球、微气泡、目标物的相对位置,利用射流流动实现了对目标推进、锚定、抓取等不同功能(图8)。相关研究成果以“Multimodal bubble microrobot near an air-liquid interface”为题,发表于国际微纳米科学重要期刊Small[14]。

图7 基于三维Helmholtz磁控系统采用手柄即可对气泡微机器人进行灵魂操控
整个系统包括信号发生器(Signal generator)、Helmholtz磁控系统(HEC)、微机(PC)、功率放大器(Power amplifier)、手柄(Gamepad)。高速相机(High speed camera)
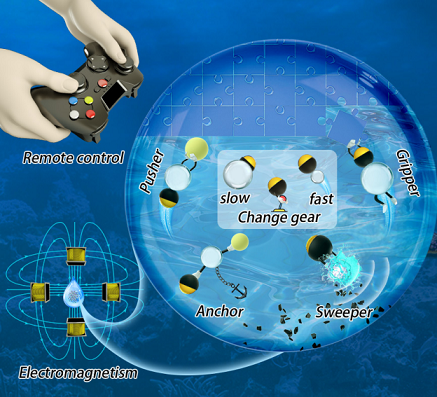
图8 利用射流流动及表面波实现对目标推进(Pusher)、锚定(Anchor)、抓取(Grip per)、清扫(Sweeper)等不同功能
作为结语,这里要指出的是,微纳马达是21世纪涌现的一种多学科交叉的新兴技术,其发展方兴未艾,它所涉及到的界面流动、反应传质、主动微流变、微气泡动力学、瞬态射流等问题需要流体力学界的学者展开深入研究。微纳马达在实际应用中也必然向更复杂的应用环境以及更多样的功能发展,逐渐升级为各种泳动微机器人(swimming microrobot)[13]。这一升级不是简单的结构堆叠,而需要从流动控制的机理和方法进行深入发掘,这值得我们继续关注和投入,为研制出成熟的微机器人技术造福人类而奠定坚实的科学基础。
参考文献
[1] Joseph Wang著,王威 译,纳米机器——基础与应用。科学出版社/龙门书局,2019.
[2] Wang J., and Gao W. Nano/microscale motors: Biomedical opportunities and challenges. ACS Nano, 6, 5745–5751, 2012.
[3] Wang, W.; et al. Small power: Autonomous nano and micromotors propelled by self-generated gradients. Nano Today, 8, 531-554, 2013.
[4] de Avila, B. E., et al. Micromotor-enabled active drug delivery for in vivo treatment of stomach infection. Nature communications, 8, 272, 2017.
[5] Wang B., et al. Endoscopy-assisted magnetic navigation of biohybrid soft microrobots with rapid endoluminal delivery and imaging. Sci. Robot. 6, eabd2813, 2021.
[6] Li J., et al. Rocket Science at the Nanoscale. ACS Nano, 10, 5619–5634, 2016.
[7] Ismagilov R., et al. Autonomous movement and self-assembly. Angew Chem Int Ed, 41, 652–654, 2002.
[8] Paxton W. F., et al. Catalytic nanomotors: Autonomous movement of striped nanorods. J Am Chem Soc, 126, 13424–13431, 2004.
[9] Solovev A., et al. Catalytic microtubular jet engines self-propelled by accumulated gas bubbles. Small, 5, 1688–1692, 2009.
[10] Moran J. and Posner J, Phoretic Self-Propulsion. Annu. Rev. Fluid Mech. 49, 511-540, 2017.
[11] Wang D., et al. Flow-pattern-altered syntheses of core-shell and hole-shell microparticles in an axisymmetric microfluidic device. ACTA MECHANICA SINICA, 37, 1378-1386, 2021.
[12] Wang D., et al. Distinct dynamics of self-propelled bowl-shaped micromotors caused by shape effect: Concave vs convex. Phys. Fluids, 33, 122004, 2021.
[13] Yasa I., et al. Elucidating the interaction dynamics between microswimmer body and immune system for medical microrobots. Science Robotics. 5, eaaz3867, 2020.
[14] Wang,L., et al. Multimodal Bubble Microrobot Near an Air–Water Interface. Small18, 2203872, 2022
附件下载: