【释疑解惑】智能机器鱼——从实验室到智慧海洋
《力学园地》编辑部:
在2023年度中国科学院第19届公众科学日之际,我有幸带着上小学的儿子一起参观了力学所展室。我们看到一件展品“仿生鱼”,很感兴趣,但限于专业领域的不同,我无力给孩子讲解里面的道理。贵刊能给我们再细致地介绍一下和这类智能机器鱼相关的知识吗?
一名小学生的家长
2023.5.20
智能机器鱼——从实验室到智慧海洋
银波
近年来,多种仿生机器鱼出现在公众视野中,吸引了大家的目光。从字面上就不难理解什么是“仿生鱼”?它是根据鱼的游动姿态和外观样式研制而成的机器鱼。这里介绍的仿生金龙鱼,就是根据金龙鱼的游动姿态和外观样式研制的机器鱼,我们称之为“仿生金龙鱼”。它是依托流体力学仿真技术设计而成,能在水中连续游动6-8小时,而且可以根据环境自主调整游动状态,并实现智能避障。

图1 仿生金龙鱼(图片来源:2021年中国军事装备展)
现在,仿生鱼不仅出现在实验室里,而且也出现在公众社会的许多场合里。例如,全球首个仿生鲸鲨就已经在上海海昌海洋公园火山鲨鱼馆中展出了,给游客呈现出高新科技赋予海洋生物别样观感的视觉盛宴。这条仿生鲸鲨,长约4.7米,重达350公斤。它虽然体型庞大,却能够高度仿真模拟真实鲸鲨的动作,可以在水中自主完成直线、转弯、上浮、下潜、定深、嘴部张合、鳃裂、吞食饵料等各种动作。这是智能机器鱼从实验室走向现实的一个例子,它为青少年感受大科学、认识高科技提供了一个小窗口。

图2 吸引着青少年的眼球的仿生鲸鲨(图片来源:浦东发布)
智能机器鱼的出现,是水下交通的一个革命性变革。应当说,在第二次世界大战期间潜艇研发成功之后,水下航行器就没有什么实质性的改变,它们都是具有坚硬、敦实的结构,都是依靠螺旋桨驱动,包括近年发展的水下机器人。无论是大型的载人潜器还是小型的机器人,大多数水下航行器都有一个能效最高的限定速度。此外,螺旋桨容易被杂物缠绕,所产生的噪声容易被监听。观察并模仿自然行为,是人类技术创新的重要源泉。20世纪末期,人们将目光投向了自然界的鱼类,1994年,美国麻省理工学院模仿金枪鱼游动模式研制出第一条仿生鱼,随后中国相继研发出自己的机器鱼。此后几十年,各国实验室也相继研发出多款机器鱼。
智能机器鱼采用类似鱼类的外观样式和游动姿态,具有生物欺骗性,对环境的扰动小,具有极高的隐蔽性。为了让智能机器鱼在水下可以安全灵活地执行任务,例如:在狭窄、复杂的水域航行、探测、协同集群,开展环境进行监测、构建水下地图,水下摄影、对海洋工程和海洋牧场进行设备维修,可燃冰探测等工作,在海洋馆中代替珍稀野生鱼类以供科普,智能机器鱼需要结合多种传感器和全局视觉控制技术,给智能机器鱼视觉、听觉、感觉。此外,智能机器鱼作为执行任务的载体,需要具有很强的可拓展性。近年来,科学家从鱼类身上获取灵感来搭建相应的传感器系统,如鱼眼相机、模仿鱼类感知水流的人工侧线系统等等,还采用许多如机器学习、强化学习等人工智能算法使得机器鱼更加智能。
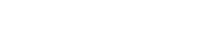
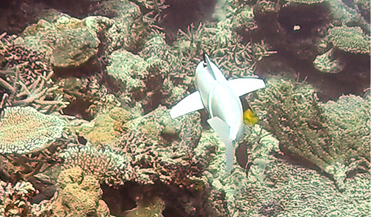
随着科学家对鱼类游动方式、推进机理的认识加深、驱动技术的革新、材料制备、智能规划与决策等技术手段的快速发展,智能机器鱼从实验室环境一步步走向实际的湖泊、展览馆,游向海洋,迈向更有意义的应用层面。特别是,随着材料和工艺的发展,更接近真鱼的软体机器鱼越来越多呈现在大众面前。这种柔软的机器鱼是环境友好的,不会吓倒真正的鱼。麻省理工学院研究人员利用一种名为SoFi的软体机器鱼(Soft Robotic Fish)去监视生活在斐济珊瑚礁里的鱼,实现了人类行为对环境干扰的最小化。浙江大学等单位研制的仿蝠鲼和狮子鱼的机器鱼采用介电弹性材料智能驱动,实现了万米马里亚纳海沟的驱动实验。佛罗里达大学研究人员在仿生金枪鱼身上安装了人工肌腱,并且让它根据速度调节鱼尾的刚度,使得能耗平均下降了一半。这些机器鱼在图3中展示。
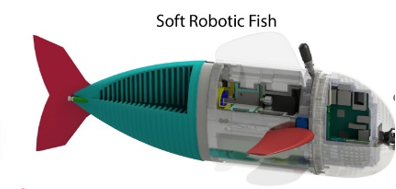
(a)SoFi三维模型及其在珊瑚礁进行生物跟踪[1]
(b)仿蝠鲼机器鱼[2]
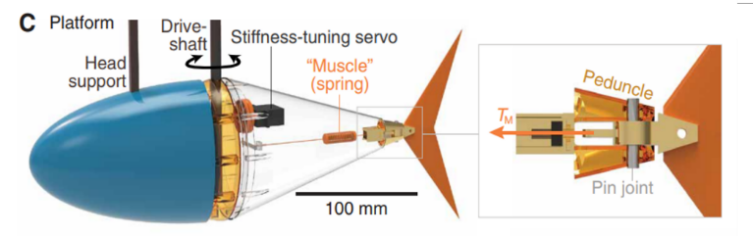
(c) 仿生金枪鱼[3]
图3 各国研发的智能仿生机器鱼
中国科学院力学研究所银波研究团队针对智能机器鱼的研发开展了大量工作。为了研制出在水中能够游得快、消耗能量少的智能机器鱼,首先必须掌握鱼类在水中的游动机理,其中会基于对金枪鱼游动的观察,我们了解到鱼类在特征性的波动游泳运动中,肌肉沿着身体从鱼头向鱼尾顺序收缩,产生身体弯曲的后向运动波,从而扰动了周围的水体。这里定义尾鳍从左向右的摆向(Left-to-Right Stroke)和右向左的摆向(Right-to-Left Stroke)合为一个完整周期,鱼类不断重复这个侧向摆动过程实现向前高效游动。然后,应用相关的流体力学知识,建立如图4所示的金枪鱼的三维自主游动模型。
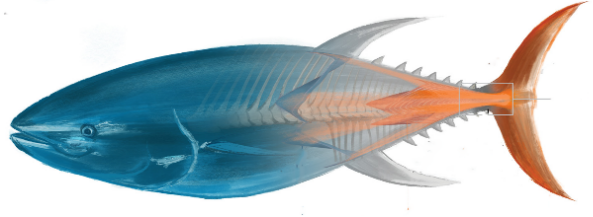
(a)真实的金枪鱼[3]
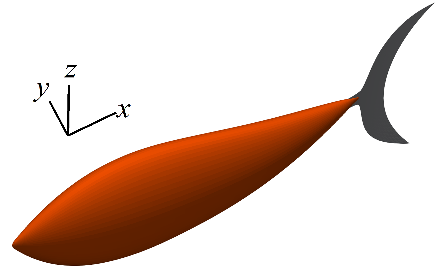
(b)金枪鱼三维模型[作者自制]
图4 金枪鱼实体及其三自主游动维模型
对于鱼体摆动过程中游动机理,研究团队做了细致的分析,包括不同部位的受力特征和尾迹涡图像。图5(a)则分析了在一个完整的游动周期(τ)中,身体(TK)和尾鳍(CF)沿前进方向的受力变化特征,其中横轴表示在这个周期中的不同时刻(t/τ),纵轴表示流向力系数(无量纲化后的)。我们定义受力正方向与鱼前进方向相反,由图可看出在游动过程中,身体主要受阻力,而尾鳍是推力的主要来源。此外,我们还分析了尾迹涡形成和脱落的具体过程,尾迹涡的演化情况可参见图5(b)。摆动过程中,在身体的体后会形成较强的涡,定义为“体后涡”(PBV),体后涡的脱落会与尾鳍前缘形成的“前缘涡”(LEV)发生碰撞,这个过程会有益于增强尾鳍前缘涡的强度,会有利于推力产生。随着鱼体摆动,旋涡向尾鳍的后缘发展,形成了尾鳍“后缘涡”(TEV)。进一步的摆动使得尾鳍后缘涡脱落,在尾迹中形成交错排列的反卡门涡街,涡街呈链式涡环结构,R1和R3即是其中的环状结构。根据对受力过程和尾迹涡发展过程的分析,我们得出了身体摆动方式和鱼体外形对游动性能的影响规律。在此基础上,我们便可以挑选出游得快、效率高或者满足任务需求的鱼体外形及摆动方式。
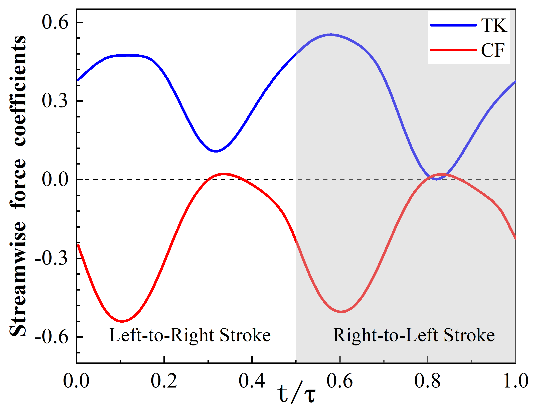
(a)鱼体不同部位受力特征
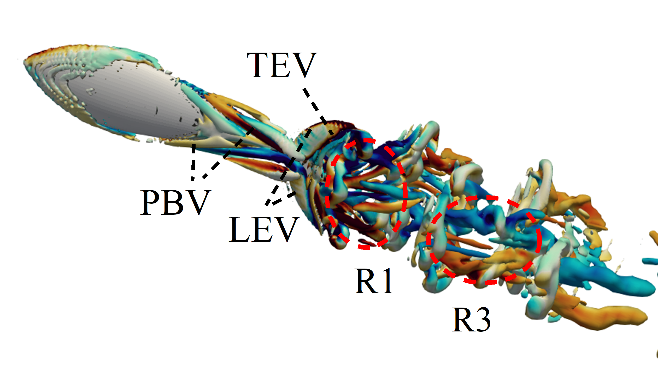
(b)尾迹涡
图5 鱼体摆动过程中游动机理分析[作者自制]
如何让所制备的智能机器鱼能够满足上述机理分析的外形以及摆动方式?外形采用3D打印技术,便可较为精确地满足要求。针对摆动方式,我们对鱼的肌肉结构的制备,提出了主动加顺从式的欠驱动推进机构,采用线驱动仿生技术,如图6所示,该机构由两部分组成,一部分是由一个电机驱动的拉线机构,另一部分由柔性材料制作而成的顺从式鱼尾,其后半部分身体由多个转动关节连接,且具有一定柔性。当内置于头部壳体的舵机带动穿过关节段的钢丝绳运动时,其尾部也随之摆动,一个电机控制一对线,极大地减少了机器鱼所需的电机数和控制难度,通过舵机旋转的角度和频率可控制机器鱼的游动姿态。使用这些方法,我们研制出可高速直线航行、并兼具灵活转弯功能的机器鱼。从图6可以看到中国科学院力学研究所研制的智能仿生机器鱼所采用的线驱动主动加顺从式柔性推进机构的细节。
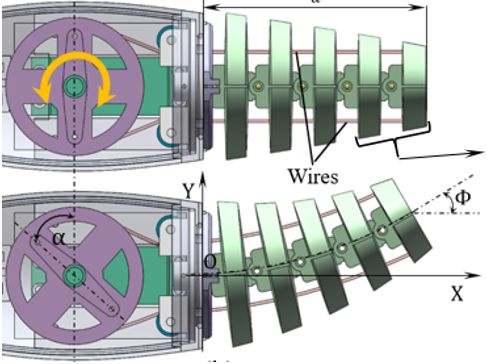
图6 中国科学院力学研究所智能仿生机器鱼的柔性推进机构示意图[作者自制]
下面的图7则是银波团队研制的智能机器鱼的三维CAD模型和智能机器鱼实物照片。这个实物已经为力学所展馆收藏并向公众展出。
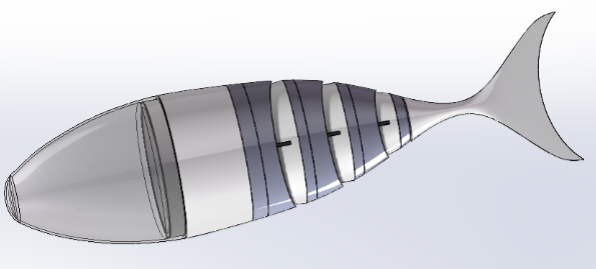
(a)三维CAD模型

(b)智能机器鱼实物图
图7 中国科学院力学研究所银波团队研制的智能机器鱼示意图[作者自制]
机器鱼能够高效运动了,研究工作只完成了一半,怎样让它执行不同的任务呢?这需要给机器鱼安装“大脑”。为了让机器鱼更智能化,我们耦合深水摄像、传感等模块,感知到外界环境的信息,并应用智能控制算法根据环境调整运动姿势。我们的机器鱼如今可以实现避障、多鱼的协同配合等任务,下一步将走向更加实际的应用场景。
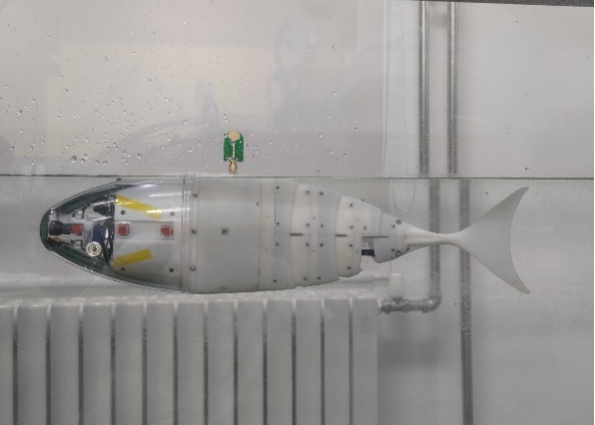
(a)机器鱼在水槽中进行游动试验

(b)双鱼协同游动
图8 中国科学院力学研究所银波团队研制的智能仿生机器鱼实验过程[作者自制]
综合目前智能机器鱼的发展来看,智能机器鱼在游动方面的机理和系统集成等方面进步很快,各类成果纷纷亮相。不过,受限于更深层次的机理研究、制作材料、驱动机构、控制策略,目前智能机器鱼的运动性能与真鱼相比仍有一定差距,包括长时巡游速度、瞬间爆发力、游动稳定性、抗扰流能力等,其感知技术水平也相对有限,大多智能机器鱼尚不具备在恶劣海洋环境下开展作业的能力。
未来,随着材料学、机械工程、控制学以及人工智能的发展,期待智能机器鱼作为一种新型海洋装备在高仿生特性、高运动特性、强智能特性等方面进一步提高水平,为人类认识、探索和利用海洋发挥更大作用。就像航空无人机在一个又一个行业中证明自己的价值一样,智能机器鱼可能会彻底改变生态学和航运学的面貌,能够各类水环境下(尤其是人类难以探索的领域)持久存在并执行复杂艰巨的任务,从而在构建智慧海洋的过程中发挥出重要作用。
参考文献
[1] Katzschmann, R. K., DelPreto, J., MacCurdy, R., & Rus, D. (2018). Exploration of underwater life with an acoustically controlled soft robotic fish. Science Robotics, 3(16), eaar3449.
[2]Li, G., Chen, X., Zhou, F., Liang, Y., Xiao, Y., Cao, X., ... & Yang, W. (2021). Self-powered soft robot in the Mariana Trench. Nature, 591(7848), 66-71.
[3] Zhong, Q., Zhu, J., Fish, F. E., Kerr, S. J., Downs, A. M., Bart-Smith, H., & Quinn, D. B. (2021). Tunable stiffness enables fast and efficient swimming in fish-like robots. Science Robotics, 6(57), eabe4088.
附件下载: